김한솔 한국자동차연구원 선임연구원은 산업분석 보고서에서 “엔비디아 알파마요는 자율주행 개발 전주기를 아우르는 개방형 통합 플랫폼으로, 기존 산업 구조를 재편할 잠재력을 지닌다”고 분석했다.
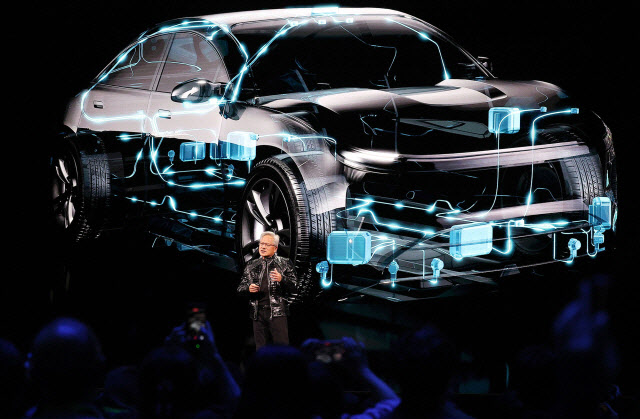
젠슨 황 엔비디아 최고경영자(CEO)가 1월 5일(현지 시간) 미국 라스베이거스 퐁텐블로 호텔에서 자율주행 사업 계획을 설명하고 있다. (사진=연합뉴스)
그동안 자율주행 기술은 룰 기반 방식과 엔드투엔드(E2E) 방식으로 양분돼왔다. 룰 기반은 예외 상황 대응에 한계가 있었고, E2E 방식은 높은 성능에도 불구하고 판단 과정을 설명하기 어려운 ‘블랙박스’ 문제가 규제 대응의 걸림돌로 작용해왔다. 여기에 대규모 데이터 수집과 검증, 통합 테스트에 따른 막대한 비용 부담이 상용화 지연의 핵심 요인으로 지목돼 왔다. 김 연구원은 “기존 룰 기반 방식은 비정형적 예외 상황 대응에 취약하고, 테슬라가 주도하는 E2E 방식은 판단 과정을 설명할 수 없는 블랙박스 문제가 규제 대응의 제약으로 작용한다”고 평가했다.
알파마요는 이러한 문제를 동시에 겨냥한 솔루션이라는 분석이다. 김 연구원은 “알파마요는 시각-언어-행동(VLA) 기반 자율주행 모델 ‘Alpamayo 1’, 시뮬레이션 프레임워크 ‘AlpaSim’, 피지컬 AI 오픈 데이터셋으로 구성된 통합 플랫폼”이라며 “AI의 직관적 추론과 전통적인 룰 기반 안전 검증을 결합한 하이브리드 아키텍처가 핵심”이라고 설명했다.
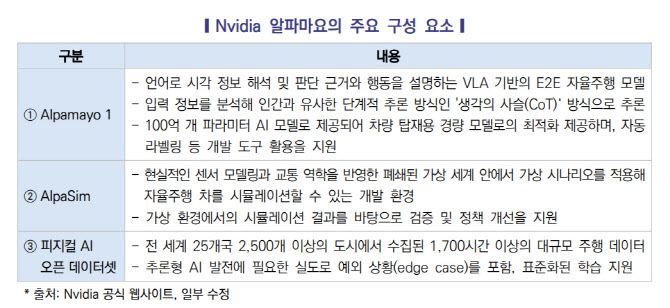
개발 비용 절감 효과도 기대 요인으로 꼽았다. 그는 “현실의 물리 법칙을 반영한 시뮬레이션 환경과 표준화된 데이터셋을 활용하면 물리적 주행 테스트 의존도를 낮추고 검증 시간을 단축할 수 있다”며 “자율주행 후발 기업의 기술 진입 장벽을 낮추는 역할을 할 것”이라고 전망했다.
다만 김 연구원은 빅테크 주도 생태계의 명암도 함께 짚었다. 그는 “HW·SW 통합 역량을 갖춘 플랫폼 기업이 자율주행 생태계의 중심에 설 가능성이 커지고 있다”면서도 “플랫폼 종속 우려와 시뮬레이션 기반 학습의 현실 정합성 문제는 여전히 남은 과제”라고 덧붙였다.