KAIST(총장 이광형) 전기및전자공학부 명현 교수 연구팀은 연구실 창업기업인 유로보틱스와의 공동 연구를 통해 사족보행 로봇 제어 기술 ‘드림워크++(DreamWaQ++)’를 개발했다고 10일 밝혔다. 해당 연구 성과는 세계 최고 권위 로보틱스 학술지인 IEEE 트랜잭션 온 로보틱스(T-RO)에 게재됐다.
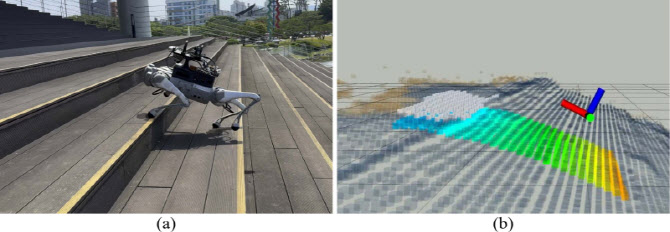
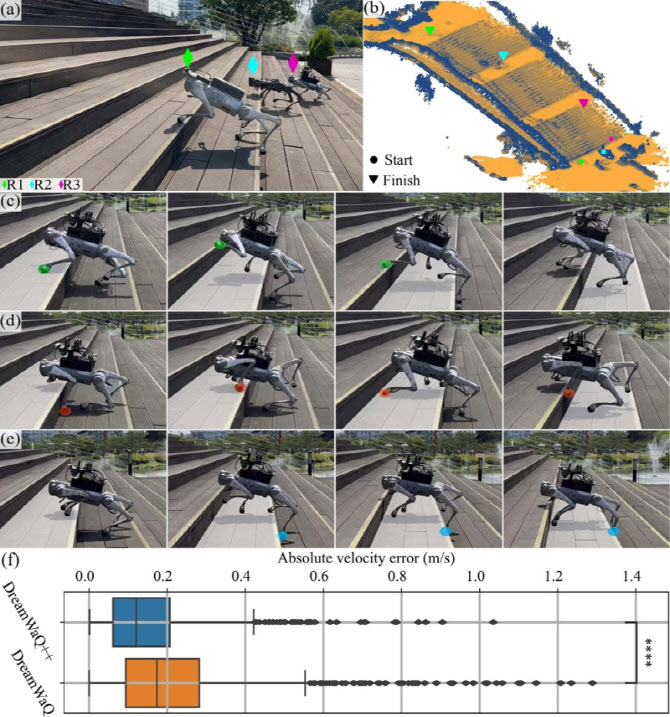
드림워크++ 계단 보행 모습 (b) 참값 (회색) 과 비교한 드림워크++ 예측 지형
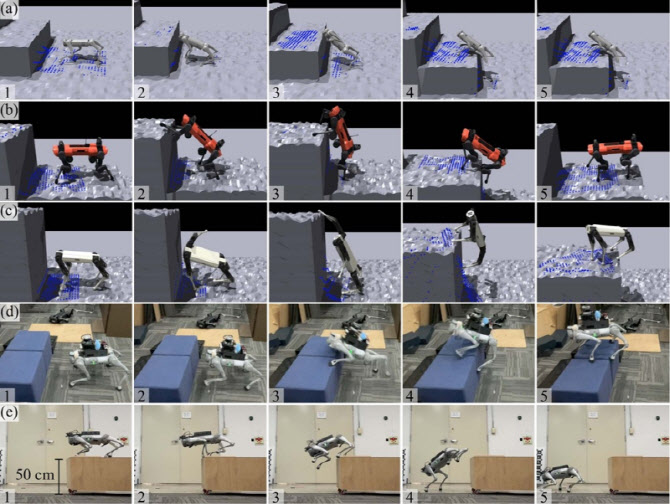
드림워크++로 훈련된 보행 제어기
드림워크++ 훈련모습.
기존 ‘드림워크(DreamWaQ)’는 관절 엔코더와 관성 센서 등 내부 감각(자기수용 감각)만으로 지형을 추정하는 ‘블라인드 보행’ 기술로, 시각 정보 없이도 안정적인 이동이 가능하다는 장점이 있었다. 다만 장애물과 접촉한 이후에야 움직임을 조정할 수 있다는 한계가 있었다.
이번에 개발된 드림워크++는 카메라와 라이다(LiDAR) 기반 외부 감각을 결합해 이러한 한계를 극복했다. 로봇이 장애물을 사전에 인지하고 보행 전략을 선제적으로 조정하는 ‘인지 기반 보행’을 구현한 것이 핵심이다.
연구팀은 다중 감각 기반 강화학습 구조를 적용해 실시간 제어가 가능하도록 설계했으며, 센서 오류가 발생해도 다른 감각으로 전환해 보행을 유지하는 안정성까지 확보했다. 또한 사족보행 로봇뿐 아니라 휴머노이드, 휠-족형 로봇 등 다양한 플랫폼에 적용 가능한 확장성도 갖췄다.
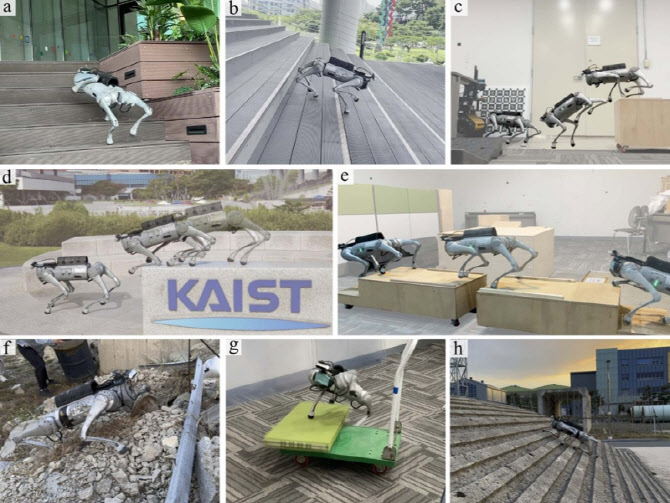
경주 및 실험모습.jpg
실험 결과 성능도 입증됐다. 드림워크++를 적용한 로봇은 50개 계단(수평 30.03m, 수직 7.38m)을 35초 만에 주파하며 기존 제어 기술을 뛰어넘는 성능을 보였다. 35도 급경사 환경에서도 안정적으로 등반했으며, 장애물 환경에서는 별도의 경로 계획 없이도 최적 경로를 스스로 선택하는 학습 기반 인지 능력을 나타냈다.
또한 불확실한 지형에서는 자발적으로 멈춰 지면을 탐색하는 ‘탐색 행동’을 보였고, 2.5kg 하중을 실은 상태에서도 41cm 높이 장애물을 극복하는 등 높은 민첩성을 입증했다. 일부 시뮬레이션 환경에서는 최대 1m 이상의 장애물 대응 능력도 확인됐다.
연구팀은 해당 기술이 재난 대응, 산업 설비 점검, 산림 및 농업 등 기존 바퀴형 로봇이 접근하기 어려운 환경에서 활용될 것으로 기대하고 있다.
이번 연구에는 KAIST 박사 출신으로 현재 크래프톤 연구원으로 활동 중인 이 마데 아스윈 나렌드라 박사가 제1저자로 참여했으며, 유로보틱스 유병호 대표, 오민호·이동규 CTO, KAIST 연구진과 MIT 박사후연구원 등이 공동 저자로 이름을 올렸다.
유로보틱스는 2024년 8월 KAIST 연구진을 중심으로 설립된 로봇 소프트웨어 스타트업으로, 험지에서도 안정적으로 이동할 수 있는 자율보행 기술을 개발하고 있다. 유병호 대표는 KAIST 전기및전자공학부 박사 출신으로, 명현 교수 연구실에서 로봇 자율보행 기술을 연구해온 전문가다. 공동 창업자인 오민호·이동규 CTO 역시 KAIST 박사 출신으로 핵심 기술 개발을 주도하고 있다.
회사는 특정 하드웨어에 종속되지 않는 범용 로봇 소프트웨어를 통해 ‘로봇 산업의 운영체제(OS)’를 구축하는 것을 목표로 하고 있으며, 향후 다양한 로봇 플랫폼에 자율보행 기능을 제공하는 솔루션 확장을 추진 중이다.

KAIST 전기및전자공학부 명현 교수